7.1.5 DerivativeTerm td
Derivative action, or rate, provides a sudden shift in output as a result of a rapid change in error. If the measured value falls quickly derivative provides a large change in output in an attempt to correct the perturbation before it goes too far. It is most beneficial in recovering from small perturbations.
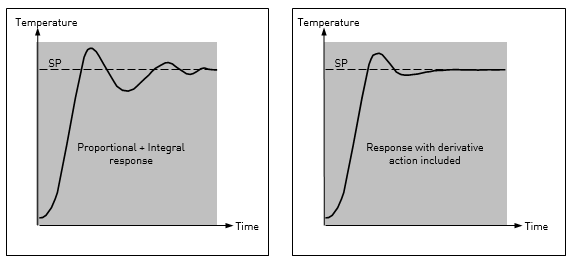
The derivative modifies the output to reduce the rate of change of error. It reacts to changes in the PV by changing the output to remove the transient. Increasing the derivative time will reduce the settling time of the loop after a transient change.
Derivative is often mistakenly associated with overshoot inhibition rather than transient response. In fact, derivative should not be used to curb overshoot on start up since this will inevitably degrade the steady state performance of the system. Overshoot inhibition is best left to the approach control parameters, High and Low Cutback, section 7.1.8.
Derivative is generally used to increase the stability of the loop, however, there are situations where derivative may be the cause of instability. For example, if the PV is noisy, then derivative can amplify that noise and cause excessive output changes, in these situations it is often better to disable the derivative and re-tune the loop.
If td is set to OFF no derivative action will be applied.
In the 800 range of controllers, derivative is calculated on change of PV. For applications such as furnace temperature control, it is common practice to use Derivative on PV to prevent thermal shock caused by a sudden change of output as a result of a change in setpoint.