Tuning Assistant

The tuning assistant will allow the user to automatically generate the PID settings for a specific loop. Click on the “click” value to start the tuning assistant.
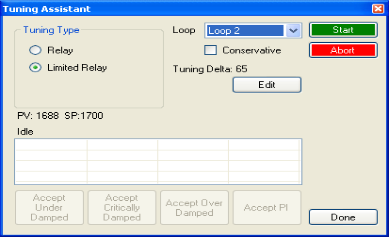
The user can select the loop to auto tune from the drop-down list next to the “Loop” label. The choices are: Loop 1, Loop 2, or Loop 3. The type of tuning to be used can be selected from the “Tuning Type” section in the top left of the form. The options are either Relay or Limited Relay. Using the Relay option will just use 100% output while the 9210 Nitrider is controlling the furnace. The Limited Relay option will reduce the % output by a user-specified amount. When the Limited Relay option is selected, the “Tuning Delta:” label and the Edit button will be visible. When the Relay option is selected, these two items will be invisible. Clicking on the Edit button will allow the user to select the new % output value. The “Conservative” option will allow the user to minimize, if not remove, the possibility for an overshoot of the setpoint. If a small overshoot is acceptable, leave the “Conservative” checkbox unchecked. If, however, no overshoot is desired, then checking the “Conservative” checkbox will accomplish this. The current value for the process variable (PV) and the selected loop’s setpoint (SP) will be displayed under the “Tuning Types” section. Click on the Start button to begin the auto tune process. Note: The process may take a few seconds to start. Once the process has started, the “Idle” line will change to “Tuning: Pointer xx”. This means that the tuning process is working. When the tuning is finished, the “Tuning: Pointer xx” line will read “Idle” again, and the list underneath will be populated with suggested PID settings. Note: clicking on the Done button while the tuning is in progress will close down the screen, but the user will have to confirm the action. However, clicking on the Abort button will simply
abort the calibration process.
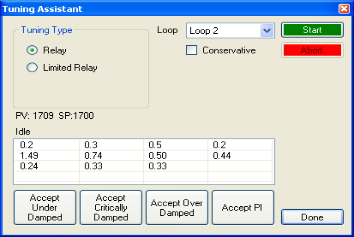
Each column for the PID settings relates to the button below. For example, the second column is the PID settings for the Critically Damped values. The user can accept only one set of numbers. To select a set of values, click on the corresponding button. For example, to accept the critically damped values, click on the Accept Critically Damped button.
The under damped values will reach the setpoint faster, but there will be more overshoot involved. The over damped values will work to minimize the overshoot, but it will be slower than the under damped values. The critically damped values are considered the “optimum” values because they are a balance between the under damped and over damped values with regards to time and overshoot. The PI values are just the proportional band and the reset value (the P and the I from PID). This could be applicable in an atmosphere loop, where the rate won’t have much effect.
Once a set of values has been accepted, the user can press the Done button to exit the screen. The accepted values can be viewed on the PID Loop Setup menu option. Note: Once the screen is closed out, the PID settings values will be lost. To populate these values again, another tuning routine will need to be run.