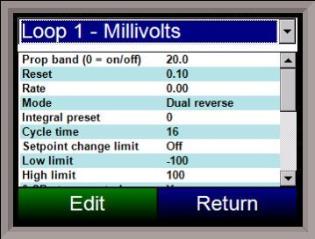
PID Loop Setup
PID is the tuning parameters entered for each Process Variable loop.
Prop Band (0 for On/Off)
This is the proportional band field. This represents the P in PID. P = Proportional. This is a field in which you want the process variable to stay around the setpoint. Clicking on the value will allow the user to change the value. The range for the proportional band value is 0 – 9999.0.
Reset
This is the reset field. This represents the I in PID. I = Integral. This is the actual temperature being monitored over a period of time and then averaged to keep within the Proportional band. The reset is in repeats per minute. This helps to eliminate offset. Clicking on the value will allow the user to change the value. The reset range 0 – 10000.00.
Rate
This is the rate field. This represents the D in PID. D = Derivative. This is the sudden change or rate in the temperature. This rate is in minutes. This affects the controller output which is proportional to the rate of change of the measurement and will control the amount of output by time restraints. Thus derivative takes action to inhibit more rapid changes of the measurement than proportional action. Derivative is often used to avoid overshoot. Clicking on the value will allow the user to change the value. The range for the rate is 0 – 10000.00. The rate is not typically used for heating/carbon.
Mode
This is the mode of the loop. Clicking on the value will allow the user to change the value.
The following is an explanation of the dual/single and direct/reverse properties:
Dual – This has two output relays which can increase and decrease to achieve your SP.
Single – This has one relay which works in only one direction to achieve your SP.
Direct - If the PV - SP is a positive number and the output would bring the PV down toward setpoint, then that is direct.
Reverse – If the PV - SP is a negative number and the output would bring the PV up toward setpoint, then that is reverse
Example: If a 12 mA output drives a 0 degree F temp. (PV) up to a 1200 degree F temp. (SP), this would be REVERSE, and since this would take a SINGLE output from the controller, the Mode for the Temperature Loop is Single Reverse.
The mode values can be:
Dual Reverse
Single Reverse
Dual Direct
Single Direct
Integral Preset
This field provides an offset for the starting point for PID control, also referred to as “Load Line” or “Manual Reset”. Clicking on the value will allow the user to change the value. The range for the integral preset is -100 to 100.
Cycle Time
Clicking on the value will allow the user to change the value. This field is typically set to the valve travel time multiplied by 1.5. The cycle time range can be 0 – 500.
Setpoint Change Limit
This is a smart time feature that allows the Process Loop to use PB only without Reset until the Process Variable drops below the percent output set under this category.
It is used to eliminate overshoot.
The Output percentage selected under this category must be above the normal operating output percentage of the furnace at heat.
Clicking on the value will allow the user to change the value.
Example – if the furnace runs at 40% output at heat for the maximum load, the setpoint change limit should be set to 60%.
The value can be:
OFF
80 %
70 %
60 %
50 %
40 %
30 %
20 %
Low Limit
This is the low limit field. Clicking on the value will allow the user to change the value. The range is –100 to 100.
High Limit
This is the high limit field. Clicking on the value will allow the user to change the value. The range is –100 to 100.
0 Setpoint Stops Control
If the Setpoint is zero, then all outputs are turned off. Clicking on the value will allow the user to change the value. The option is either Yes or No.
IN1 high stops control
If input 1’s high limit is reached, then all outputs are turned off. The value can either be Yes or
No.
IN2 high stops control
If input 2’s high limit is reached, then all outputs are turned off. The value can either be Yes or
No.
IN3 high stops control
If input 3’s high limit is reached, then all outputs are turned off. The value can either be Yes or
No.
PID Auto Switch
This is the PID auto switch field. The value can either be Yes or No.
Switch Point PID 1 -> 2
This is the PID Switch Point field. The range is –500 to 4000.
Switch Point PID 2 -> 3
This is the PID Switch Point field. The range is –500 to 4000.
Overshoot Limit Gain
This is the Overshoot limit gain field. When calculating the control action sometimes the calculation would call for more than 100%, which is not possible. The output is limited to 100%, or whatever was set in the High Limit field. The difference of the unlimited minus the limited is multiplied by the overshoot limit gain and divided by 100. This is subtracted from the control output. If the gain is 0 there is no effect. Under normal control, the unlimited equals the limited and there is no effect. If there is a big change where the control loop drives hard, then the effect is to limit the drive as it approaches setpoint and limit the overshoot.
The limited is the values set in the upper and lower limits fields. The unlimited would be what is calculated before limiting. For a big setpoint change, the calculations may compute 150% output, but the true output is limited to the upper limit. The range is 0 to 9999.
Setpoint Lower Limit
This is the setpoint lower limit for the loop. The range is -500 to 4000.
Setpoint Upper Limit
This is the setpoint upper limit for the loop. The range is -500 to 4000.
Use Input 3 as remote SP
This will allow the user to use input 3 as a remote setpoint. The options are: yes or no.
Control Input
This will allow the user to view the input that will act as a control T/C. This setting is fixed and cannot be changed by the user.